



Was ist SPI-Kommunikation?
In modernen elektronischen Systemen spielen Kommunikationsprotokolle eine entscheidende Rolle. SPI (Serial Peripheral Interface) ist ein weit verbreitetes synchrones serielles Kommunikationsprotokoll, das einen schnellen Datenaustausch zwischen einem Master-Gerät und mehreren Peripheriegeräten ermöglicht. Im Gegensatz zur herkömmlichen parallelen Kommunikation erreicht SPI eine effiziente Datenübertragung mit geringer Latenz und weniger Leitungen (vier Hauptsignalleitungen).
Ein Kernmerkmal von SPI ist die Vollduplex-Datenübertragung, d. h. es kann Datenein- und -ausgabe gleichzeitig verarbeiten. Dadurch eignet sich SPI besonders für Anwendungen, die eine schnelle Datenübertragung in Echtzeit erfordern, wie z. B. Rückkopplungssysteme in Encodern.
Grundlegende Funktionsweise des SPI-Protokolls
Als synchroner Bus ist das dedizierte Taktsignal (SCLK) eine der wichtigsten Verbindungen im SPI-Protokoll. Dieses Taktsignal koordiniert den gesamten Datenaustausch und ermöglicht so den synchronen Betrieb von Master- und Slave-Geräten. SPI unterstützt Vollduplex-Betrieb, und der Datenaustausch erfolgt unabhängig zwischen Master und Slave über dedizierte Leitungen. Da alle Datenübertragungen durch das Taktsignal koordiniert werden, müssen Master- und Slave-Geräte keine Parameter wie Datenrate oder Nachrichtenlänge aushandeln.
Jedes Slave-Gerät verfügt über einen „Chip Select“-Pin (CS), über den das Master-Gerät jederzeit steuern kann, mit welchem Peripheriegerät es kommuniziert. Dieser Mechanismus ermöglicht die gemeinsame Nutzung desselben SPI-Busses durch mehrere Peripheriegeräte, und der Master kann durch Umschalten des Chip-Select-Signals auswählen, mit welchem Slave er kommunizieren möchte.
Die AMT22-Serie bietet beispielsweise SPI-Encoder, die für den Betrieb mit einem 2-MHz-Taktsignal konfiguriert werden können. Dadurch kann der Encoder auf Anfrage des Masters seine aktuelle Position in nur 1500 Nanosekunden mitteilen. Die Verdrahtungskonfiguration für SPI ist einfach und verfügt über dedizierte Anschlüsse für Master Out Slave In (MOSI) und Master In Slave Out (MISO) an jedem Gerät, wie in der folgenden Abbildung dargestellt. Das Master-Gerät verfügt über dedizierte Anschlüsse für die einzelnen Chip-Select-Pins.
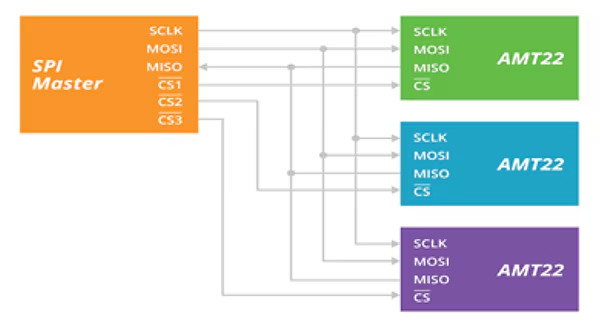
Das SPI-Protokoll verwendet gemeinsame Takt- und Datenanschlüsse mit dedizierten Chip-Select-Anschlüssen für jedes Slave-Gerät.
Als Single-Ended-Bus eignet sich das SPI-Protokoll gut für Verbindungen über kurze Distanzen (ca. 1 Meter oder weniger) bei Verwendung von Hochgeschwindigkeitstakten. Diese Distanz kann vergrößert werden, wenn die Taktrate reduziert wird, um die Signalintegrität zu wahren. Diese Flexibilität macht das SPI-Protokoll äußerst vielseitig und für verschiedene Anwendungen geeignet.
Wie funktionieren SPI-Encoder?
Encoder mit SPI-Kommunikation übertragen Positions- und Geschwindigkeitsfeedback in Echtzeit an ein Steuerungssystem oder einen Mikrocontroller unter Verwendung des SPI-Protokolls. SPI verwendet vier Hauptsignalleitungen für die Datenübertragung:
MOSI (Master Out Slave In): Master sendet Daten an Slave.
MISO (Master In Slave Out): Slave sendet Daten an Master.
SCK (Serial Clock): Steuert das Taktsignal und gewährleistet eine synchronisierte Datenübertragung.
CS (Chip Select): Wählt das spezifische Peripheriegerät (z. B. einen Encoder) für die Kommunikation aus.
In diesem Modus überträgt der Encoder Drehpositionsinformationen oder andere relevante Daten über SPI an das übergeordnete Steuerungssystem und gewährleistet so eine Echtzeit- und genaue Positionsrückmeldung. Dies ist besonders wichtig in Automatisierungssystemen, die eine präzise Steuerung erfordern.
Arten von SPI-Encodern
SPI-Encoder gibt es in zwei Haupttypen: Inkrementalgeber und Absolutgeber, basierend auf ihrer Rückkopplungsmethode und den Anwendungsszenarien.
Inkremental-SPI-Encoder
Inkrementalgeber liefern Positionsinformationen durch die Aufzeichnung inkrementeller Rotationsänderungen. Jedes Mal, wenn sich die Encoderwelle um einen bestimmten Winkel dreht, erzeugt sie Impulssignale. Inkrementelle Encoder werden häufig in Anwendungen eingesetzt, die eine kontinuierliche Rotationsverfolgung erfordern, wie z. B. zur Rückmeldung der Motorposition.
Vorteile:
Geeignet für Anwendungen, die eine hohe Echtzeitleistung erfordern.
Unterstützen höhere Geschwindigkeiten und werden häufig in Servomotoren und industriellen Steuerungssystemen eingesetzt.
Kostengünstig und ideal für einfache Bewegungssteuerungsaufgaben.
Absolute SPI-Encoder
Absolute Encoder verfügen über einen eindeutigen digitalen Code für jede Position. Selbst nach einem Stromausfall merkt sich der Encoder seine Position und kann nach Wiederherstellung der Stromversorgung genaue Daten ausgeben. Dies macht Absolutwertgeber besonders vorteilhaft für eine präzise Positionsregelung.
Vorteile:
Bietet absolute Positionsdaten ohne Referenzpunkt.
Hohe Genauigkeit, geeignet für hochpräzise Positionierungssysteme.
Kann nach Wiederherstellung der Stromversorgung eine genaue Positionsrückmeldung liefern.
Vorteile der Verwendung von SPI-Encodern
SPI-Encoder bieten mehrere bemerkenswerte Vorteile in der industriellen Automatisierung und Präzisionssteuerungssystemen:
1. Hochgeschwindigkeitsdatenübertragung
SPI unterstützt Hochgeschwindigkeitsdatenaustausch, sodass Encoder Positionsinformationen in Echtzeit übertragen können, ohne die Reaktionszeit des Systems zu beeinträchtigen. Für Anwendungen, die schnelles Feedback erfordern, wie z. B. die Steuerung von Robotergelenken und die Bewegungssteuerung, sind SPI-Encoder die ideale Wahl.
2. Genauigkeit und Stabilität
Die SPI-Kommunikation gewährleistet eine zuverlässige Datenübertragung. Da die Encoderdaten in Echtzeit übertragen werden, erhält das System bei jeder Drehung präzises Positions- und Geschwindigkeitsfeedback. Unabhängig davon, ob inkrementelle oder absolute Encoder verwendet werden, gewährleistet SPI die Datengenauigkeit.
3. Einfache Integration und hohe Kompatibilität
SPI wird von den meisten modernen Mikrocontrollern unterstützt, sodass sich SPI-Encoder problemlos in bestehende Steuerungssysteme integrieren lassen. Entwickler erreichen einen effizienten Datenaustausch mit minimalem Hardware- und Programmieraufwand.
4. Reduzierte Verdrahtungskomplexität
Im Vergleich zu herkömmlichen parallelen Datenübertragungsmethoden verwendet die SPI-Kommunikation nur vier Signalleitungen. Dies vereinfacht den Verdrahtungsprozess erheblich, reduziert elektromagnetische Störungen und senkt die Gesamtkosten. Dies ist ein erheblicher Vorteil für komplexe Automatisierungssysteme.
Praktische Anwendungen von SPI-Encodern
Aufgrund ihrer effizienten und präzisen Eigenschaften werden SPI-Encoder häufig in verschiedenen Branchen und Anwendungen eingesetzt, die eine genaue Positionsrückmeldung erfordern:
Robotik
Die präzise Steuerung von Roboterarmen und -gelenken erfordert eine Positionsrückmeldung in Echtzeit. SPI-Encoder spielen in solchen Anwendungen eine entscheidende Rolle, indem sie stabile und genaue Positionsdaten liefern und so die Bewegungspräzision und -stabilität des Roboters gewährleisten.Industrielle Automatisierung
In modernen Fabriken und Produktionslinien benötigen automatisierte Geräte eine ständige Echtzeitrückmeldung, um Bewegungs- oder Betriebsparameter anzupassen. SPI-Encoder liefern hochpräzise Positionsdaten und sind daher ein wesentlicher Bestandteil der industriellen Automatisierung.Servomotorsteuerung
Servomotorsteuerungssysteme erfordern eine schnelle und genaue Reaktion auf externe Eingangssignale. Durch den Einsatz von SPI-Encodern erhalten Servosysteme Echtzeit-Positions- und Geschwindigkeitsfeedback und ermöglichen so eine präzise Geschwindigkeits- und Winkelregelung.
So integrieren Sie SPI-Encoder in Systeme
Die Integration eines SPI-Encoders in ein bestehendes Steuerungssystem ist relativ unkompliziert. Hier sind die wichtigsten Schritte zur Integration:
1. Auswahl des geeigneten Encoders
Wählen Sie zunächst den richtigen SPI-Encoder basierend auf den Anwendungsanforderungen. Für hochpräzise Positionierungsanwendungen werden Absolutwertgeber empfohlen, während Inkrementalgeber ideal für Echtzeitleistung in Anwendungen sind, die keine Positionswiederherstellung nach einem Stromausfall erfordern.
2. Hardware anschließen
Der SPI-Encoder muss über die SPI-Schnittstelle mit dem Master-Controller verbunden werden. Verbinden Sie die MOSI-, MISO-, SCK- und CS-Leitungen des Encoders mit den entsprechenden Pins des Mikrocontrollers. Achten Sie auf stabile Verbindungen, um Störungen oder Datenübertragungsfehler zu vermeiden.
3. SPI-Parameter konfigurieren
Konfigurieren Sie softwareseitig die SPI-Kommunikationsparameter wie Datenübertragungsrate, Taktpolarität und Taktphase. Stellen Sie sicher, dass die Datenübertragung zwischen Encoder und Master-Controller reibungslos verläuft.
4. Testen und Debuggen
Testen Sie nach der Integration das System, um sicherzustellen, dass der Encoder genaue Daten ausgibt. Bei Problemen verwenden Sie Debugging-Tools, um die SPI-Signale zu analysieren und notwendige Anpassungen vorzunehmen.
Encoder mit SPI-Kommunikation sind unverzichtbare Komponenten moderner Industriesysteme. Sie liefern hochpräzise Positions- und Geschwindigkeitsrückmeldungen in Echtzeit und verbessern die Systemreaktionszeit und -stabilität durch effiziente Datenübertragung. Ob in der Robotik, der industriellen Automatisierung oder in Bewegungssteuerungssystemen – SPI-Encoder spielen eine entscheidende Rolle für effizientere und präzisere Abläufe.
Durch die kluge Auswahl und Integration von SPI-Encodern können Sie die Gesamtleistung Ihres Systems deutlich verbessern und einen zuverlässigen, leistungsstarken Betrieb sicherstellen.